Self-financed
This is an overview of our self-financed research and development projects, which also gives a good overview of our research interests. This area also shows the products and services which were developed in-house and are already available on the market, or at least can be demonstrated. In some cases the complete sourcecode of the solutions is available under GPL-License.
2020/02/22
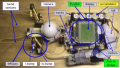
I was motivated for this project by my - at project start - two-year old daughter who always
hid her toys under the couch. It was quite hard finding out what lay down below. So we built a robot that could be
remotely controlled by any Android device via Wifi, drove under
the couch, looked at the toys, and moved out what toys it found. It was
just under 6.5cm tall, streamed high-quality H264-encoded video in real time,
was controlled with a...
2011/01/20
 We develop AR system which combine realtime camera video with virtual objects or otherwise modify it. We are especially concerned with markerless AR where no special markers are needed and where virtual objects can be anchored to arbitrary images or general faces.
We develop AR system which combine realtime camera video with virtual objects or otherwise modify it. We are especially concerned with markerless AR where no special markers are needed and where virtual objects can be anchored to arbitrary images or general faces.
2010/10/12
 We developed - initially for a customer and later self-financed - a system for eye tracking using video data from off-the-shelf USB cameras. Initially the system needed a calibration per session. In the mean time there is also a calibration-free version and is also used in our Augmented Reality research for 3D face recognition. The system has the following advantages versus commercially available eye tracking systems that use active sensing...
We developed - initially for a customer and later self-financed - a system for eye tracking using video data from off-the-shelf USB cameras. Initially the system needed a calibration per session. In the mean time there is also a calibration-free version and is also used in our Augmented Reality research for 3D face recognition. The system has the following advantages versus commercially available eye tracking systems that use active sensing...
2010/07/01
 In 2003, we built a prototype 8x8 board which records Go moves during normal play, thus ensuring that a full game record is available for each game. No special stones are necessary, no holes need to be drilled through the board - it is a nice example for Ubiquituous/Pervasive Computing. The technology used then was a capacitive matrix array, now made famous by its use in the iPhone and Android mobile phones - it's the technology that made...
In 2003, we built a prototype 8x8 board which records Go moves during normal play, thus ensuring that a full game record is available for each game. No special stones are necessary, no holes need to be drilled through the board - it is a nice example for Ubiquituous/Pervasive Computing. The technology used then was a capacitive matrix array, now made famous by its use in the iPhone and Android mobile phones - it's the technology that made...
2010/05/31
 Our long-term goal is to explain how the relatively small nervous system of C. elegans implements observable learning behaviour, in order to obtain inspiration for building new robust learning algorithms. First results as paper and code are already available, see below.
This page describes the software accompanying the paper Quantifying Phenotypic Variation in Isogenic Caenorhabditis elegans... (Citation see below). The software analyzes...
Our long-term goal is to explain how the relatively small nervous system of C. elegans implements observable learning behaviour, in order to obtain inspiration for building new robust learning algorithms. First results as paper and code are already available, see below.
This page describes the software accompanying the paper Quantifying Phenotypic Variation in Isogenic Caenorhabditis elegans... (Citation see below). The software analyzes...
2010/02/11
 We have created a stand-alone autofocus application for Logitech USB cameras with proprietary motor focus extension. This application will allow you to automatically set the appropriate focus for a given scene in a few seconds.
The underlying focus-from-image estimation has been integrated into guvcview, and beats all published approaches (according to our tests and to feedback from its developer). Therefore we have made the algorithm...
We have created a stand-alone autofocus application for Logitech USB cameras with proprietary motor focus extension. This application will allow you to automatically set the appropriate focus for a given scene in a few seconds.
The underlying focus-from-image estimation has been integrated into guvcview, and beats all published approaches (according to our tests and to feedback from its developer). Therefore we have made the algorithm...
2009/07/09
 Together with Martin Bachem we developed a Linux driver for the OCZ NIA - a three-channel EEG with 1000 Hz sampling frequency.
Internally, the hardware was licensed from Brain Actuated Technologies, makes this a very good system at a very low price. For example, the highly awarded system by g.tec Guger Technologies uses a similar hardware.Market price is currently about 100 EUR. We'd be happy to develop custom software for your application.
...
Together with Martin Bachem we developed a Linux driver for the OCZ NIA - a three-channel EEG with 1000 Hz sampling frequency.
Internally, the hardware was licensed from Brain Actuated Technologies, makes this a very good system at a very low price. For example, the highly awarded system by g.tec Guger Technologies uses a similar hardware.Market price is currently about 100 EUR. We'd be happy to develop custom software for your application.
...
2009/04/15
 To have full control over preprocessing, we have created our own dataset for handwritten digit recognition. The full preprocessing
is described in technical report TR-2005-27 (citation see below), and the digits were
contributed by Austrian university students as part of our 2005 lecture AI Methods for Data Analysis, sadly discontinued. We scanned one page per student and automatically extracted the image data for the handwritten digits.
...
To have full control over preprocessing, we have created our own dataset for handwritten digit recognition. The full preprocessing
is described in technical report TR-2005-27 (citation see below), and the digits were
contributed by Austrian university students as part of our 2005 lecture AI Methods for Data Analysis, sadly discontinued. We scanned one page per student and automatically extracted the image data for the handwritten digits.
...
2004/04/29
 This is a step-by-step instruction on how to switch any common RC car to bluetooth control - i.e. creating a bluetooth-controlled car - like the one on the right, which was donated by my dear brother after years of collecting dust on his shelf. Although the steps seem quite simple and straight-forward to me, experience has dictated that the human capacity for miscomprehension is boundless - if in doubt, have your voltmeter ready and...
This is a step-by-step instruction on how to switch any common RC car to bluetooth control - i.e. creating a bluetooth-controlled car - like the one on the right, which was donated by my dear brother after years of collecting dust on his shelf. Although the steps seem quite simple and straight-forward to me, experience has dictated that the human capacity for miscomprehension is boundless - if in doubt, have your voltmeter ready and...
2001/10/01
 In 1998/1999, we built a mobile robot toy cat based on the EyeBot-board and LEGO. While it was much fun and sometimes enlightening, ultimately we were sorely disappointed with the State-of-the-Art and now take only a cursory interest in this field.
A short story to illustrate shortcomings of robotics technology: I had the pleasure to be one of the many spectators of RoboCup '99 in Stockholm which featured a Sony legged-robot league and can...
In 1998/1999, we built a mobile robot toy cat based on the EyeBot-board and LEGO. While it was much fun and sometimes enlightening, ultimately we were sorely disappointed with the State-of-the-Art and now take only a cursory interest in this field.
A short story to illustrate shortcomings of robotics technology: I had the pleasure to be one of the many spectators of RoboCup '99 in Stockholm which featured a Sony legged-robot league and can...
2000/01/01
Since 2000, I am aware of Simpson's paradox. Although well known to
statisticians and machine learning researchers, it is practically ignored
in all business intelligence systems which are based on aggregated numbers (Kennzahlensysteme) - and practically all existing systems fall into this category.
Simpson's paradox: when data on different aggregation levels yields apparently contrary interpretations. Consider following results from a...